Hallo,
Im Grunde ist dies die Definition der Beschleunigung. Man ist also nicht drauf gekommen im Sinne einer Berechnung, sondern man hat gemerkt, dass die zweite Ableitung nach der Position \(\vec{s}\) eine sinnvolle Größe ist, die man Beschleunigung nennt.
Vor der Beschleunigung hat man Geschwindigkeit definiert. Geschwindigkeit ist die erste Ableitung von \(\vec{s}\) nach der Zeit.
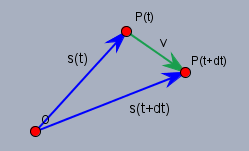
Stelle Sir vor, Du befindest Dich zum Zeitpunkt \(t\) z.B. mit einem Fahrrad an der Position \(\vec{s}(t)\). Und Du fährst mit dem Fahrrad. Schaut man nun einen sehr kleinen Zeitraum \(\Delta t\) in die Zukunft, so bist Du und das Fahrrad nicht mehr bei \(\vec{s}(t)\) sondern bei \(\vec{s}(t + \Delta t)\). Und genau wie beim Differenzieren einer Funktion (was anderes ist das hier auch nicht!) bestimmt man nun die Geschwindigkeit \(\vec{v}\) aus:
$$\vec{v} = \frac{\text{d} \vec{s}}{\text{d}t}= \lim_{\Delta t \to 0} \frac{\vec{s}(t + \Delta t) - \vec{s}(t)}{\Delta t}$$
Genauso geht es mit der Beschleunigung weiter. Hier wird wieder nach der Zeit differenziert.
$$\vec{a} = \frac{\text{d} \vec{v}}{\text{d} t} = \frac{\text{d} }{\text{d} t} \left( \frac{\text{d} \vec{s}}{\text{d}t} \right) = \frac{\text{d}^2 \vec{s}}{\text{d}t^2}$$Und das mit den \(\text{d}\)'s bzw. deltas ist einfach nur eine Schreibweise. Falls irgendwas unklar ist, so frage bitte noch mal nach.
Gruß Werner