Meine Ergebnisse sind:
$$\begin{aligned}M_{D1} &= \begin{pmatrix} -1\\1\\1 \end{pmatrix}aF \\ M_{D2}&= \begin{pmatrix} -1\\-2\\2 \end{pmatrix}aF \\ M_{D3}&=\begin{pmatrix} -1\\1\\-1 \end{pmatrix}aF \end{aligned}$$
Und das \(M_D\) - (bzw. \(M_{D\text{res}}\); das ist das gleiche!) - ist die Summe dieser drei Momente. Hier nochmal die Berechnung von \(M_{D1}\):
$$\begin{aligned} M_{D1} &= (\vec{r}_A - \vec{r}_D) \times F_1 \\& = \left( \begin{pmatrix} 0\\0\\0 \end{pmatrix} - \begin{pmatrix} 2a\\a\\a \end{pmatrix}\right) \times \begin{pmatrix} 1\\0\\1 \end{pmatrix}F \\ &= \begin{pmatrix} -2\\ \colorbox{#ffff44}{-1} \\ \colorbox{#88ccff}{-1} \end{pmatrix} \times \begin{pmatrix} \colorbox{#88ff88}{1}\\0\\ \colorbox{#ffcc88}{1} \end{pmatrix}aF \\ &= \begin{pmatrix} \colorbox{#ffff44}{-1} \cdot \colorbox{#ffcc88}{1} - (\colorbox{#88ccff}{-1}) \cdot 0\\ \colorbox{#88ccff}{-1} \cdot \colorbox{#88ff88}{1} - (-2) \cdot \colorbox{#ffcc88}{1}\\-2 \cdot 0 - (\colorbox{#ffff44}{-1}) \cdot \colorbox{#88ff88}{1} \end{pmatrix}aF\\ &= \begin{pmatrix} -1\\1\\1 \end{pmatrix}aF \end{aligned}$$
Ich habe die einzelnen Werte in den Vektoren teilweise farblich markiert, so sieht man welche 1 bzw. -1 wo hinkommt.
Und für \(M_{D3}\) habe ich Dir das grafisch im Geoknecht3D eingegeben. Also nur \(F_3\) und das resultierende Moment um \(D\).
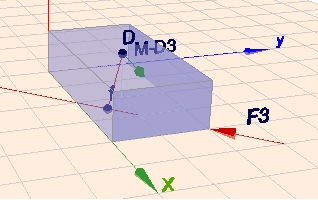
(klick auf das Bild und bewege die Szene mit der Maus)
Du siehst dort die Kraft \(F_3\) und ihre Wirklinie (rot). Vom Punkt \(D\) habe ich das Lot auf die Wirklinie gefällt. Dort erhalte ich den Punkt \(f\). Die Strecke \(Df\) ist der Hebelarm für \(F_3\) um den Punkt \(D\). Das Moment steht senkrecht auf dem Hebelarm und senkrecht auf der Wirklinie. Also rein optisch ist das Ergebnis (s.o.) ok!
Mir wäre es noch trotzdem wichtig zu wissen, ob MD auch gleich MDres darstellt?
Ja - das ist so (s.o.). Es ist die Summe aller Momente.
Brauche ich nicht MD1-MD3 aufschreiben?
das verstehe ich nicht? Ziehst Du die beiden Momente von einander ab?
Gruß Werner