Hallo liebe Leute!
Ich benutze CATIA inkl. FEM. Ich habe aber nur allgemeine Fragen.
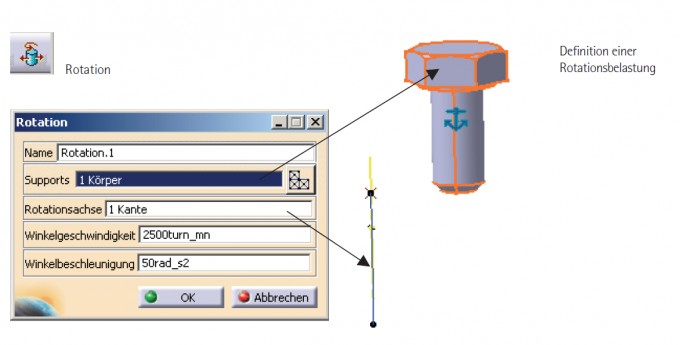
In dem Programm kann ich die Winkelgeschwindigkeit und/oder Winkelbeschleunigung bei der Rotation eines Körpers um eine Achse eingeben.
a) Wenn ich nur die Winkelgeschwindigkeit auf einen bestimmten Wert setze und die Winkelbeschleunigung auf 0 setze, dann ist das z. B. so, als würde sich ein Roboter mit konstanter Winkelgeschwindigkeit um seine eigene Achse drehen.
b) Wenn ich nur die Winkelbeschleunigung auf einen bestimmten Wert setze und die Winkelgeschwindigkeit auf 0 setze, dann ist das z. B. so, als würde sich ein Roboter mit konstanter Winkelbeschleunigung um seine eigene Achse drehen, sodass die Winkelgeschwindigkeit immer steigt.
2 Fragen:
1) Was heißt es aber physikalisch, wenn ich sowohl der Winkelgeschwindigkeit als auch die Winkelbeschleunigung einen Wert zuordne?
Ist das dann die Anfangs- oder Endgeschwindigkeit? Was hat das für eine Bedeutung?
2) Inwiefern funktioniert b) eigentlich überhaupt? Ich meine: Es muss doch spannungstechnisch einen Unterschied machen, welche Endgeschwindigkeit das Bauteil hat. Ich meine z. B. wird eine Zentrifuge mit konstanter Winkelbeschleunigung ja immer schneller, sodass die Zentripetalkräfte und damit die Spannungen im Bauteil immer größer werden müssen.
Ich freue mich über eine angeregte Diskussion.