Hallo mistermathe,
Wichtig ist - wie so oft - das man sich alles noch mal aufzeichnet und sich klar macht, was gegeben ist und welche Größen gesucht sind.
Die Gleichung \(M=a \cdot F\) gilt genau nur dann in der Form, wenn \(a\) und \(F\) skalarer Natur sind und und \(a\) senkrecht auf \(F\) steht. Oder eben, wenn \(a\) und \(F\) als Vektoren gegeben sind - dann lässt sich das Moment aus dem Kreuzprodukt der bedien Größen berechnen und dann müssen beide Größen auch nicht senkrecht auf einander stehen.
Ich mache es hier ohne Vektoren - dann ist der Abstand \(a\) der Wirkungslinie der Kraft vom Drehpunkt \(A\) gesucht.
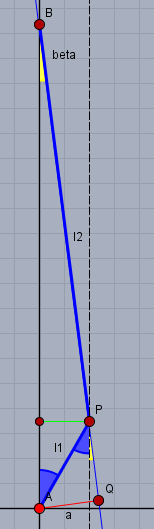
Oben siehst Du die Strecke und damit den Hebelarm \(a\) (rot) eingezeichnet. Der gelbe Winkel sei \(\beta\). Eine wesentliche Erleichterung bei der Lösung dieser Aufgabe besteht darin, das Dreieck \(AQP\) zu 'sehen'. Hier gilt nämlich
$$\sin{(\alpha + \beta)} = \frac{a}{l_1}$$
Der Winkel \(\beta\) lässt sich über die grün eingezeichnete Strecke \(e\) berechnen. Aus \(e = l_1 \cdot \sin(\alpha)\) und \(e=l_2 \cdot \sin(\beta)\) folgt
$$\sin(\beta) = \frac{l_1}{l2} \sin(\alpha)$$
und damit lässt sich \(a\) bereits hinschreiben
$$a = l_1 \cdot \sin{\left( \alpha + \arcsin\left( \frac{l_1}{l2} \sin(\alpha)\right) \right)}$$
Deine Annahme, dass \(F\) (für das Moment) bereits gegeben ist, ist falsch. Da das Lager der Pleuelstange reibungsfrei ist, wirkt die Kraft in der Stange nur in Richtung der beiden Aufhängepunkte der Stange. Die gegebene Kraft \(F\) teilt sich in eine Kraft senkrecht zum Hub und in die Kraft \(F_P\), die in Richtung der Pleuelstange.
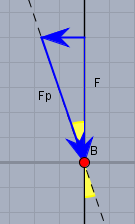
Der gelbe Winkel ist wieder \(\beta\) (s.o.). \(F_P\) berechnen sich aus
$$F_P=\frac{F}{\cos( \beta )}$$
Das gesuchte Moment ist \(M=-a \cdot F_P\). Das Minuszeichen resultiert aus der Vorgabe, dass ein positives Moment links drehend sein soll und so wie ich oben die Größen definiert habe, ist das Moment aber rechts drehend - daher das Minus. Jetzt haben wir alle Größen bestimmt und brauchen nur noch einsetzen:
$$M=- l_1 \cdot \sin{\left( \alpha + \arcsin\left( \frac{l_1}{l2} \sin(\alpha)\right) \right)} \cdot \frac{F}{\cos \left( \arcsin \left( \frac{l_1}{l2} \sin(\alpha)\right) \right)}$$
$$\space =- l_1 \cdot F \cdot \frac{\sin{\left( \alpha + \arcsin\left( \frac{l_1}{l2} \sin(\alpha)\right) \right)}}{\cos \left( \arcsin \left( \frac{l_1}{l2} \sin(\alpha)\right) \right)}$$
Gruß Werner